Memory in Atom
The next gap I am going to fill is access to the memory of Atom. The concept of reading and writing to memory will be important for various problems that I will eventually want to solve. This includes things like the following:
- Setting up data before program execution, like a jump table
- Using more than 16 registers of data, at which point some data needs to be pushed off into memory
- Adding procedure calls, in which some registers need to be preserved and I need to save context about where to return
For now, I am just going to deal with reading and writing data from memory into or out of a register. This page describes change between #jump-atom and #memory-atom in the git repository.
Where and What to Read or Write
First up, I need to figure out what instructions are involved in loading memory to and from registers. I need to represent a 16 bit address, and I need to be able to select what register to read to or write from. I can use one register to store the address, which mean in the instruction I only need 4 bits to specify which register to use and 4 bits to specify the source/destination. Because I need to use 4 bits for the op code, I have 4 bits left over. There are some interesting choices I could make around these last four bits.
I could sum two registers to create and address. This would be useful for things like indexing into an array, preventing me from having to perform addition before a memory operation. However, it isn’t free from problems. Since no register is reserved to be a zero value, indexing base on a single register would be more difficult and would require zeroing out a register if this were the only option.
I could use the remaining 4 bits as an immediate value added to the register. This would prevent the problem in the first strategy because you can always use 0. But, it doesn’t let you dynamically add values based on registers, you must make the decision while writing the program. What it does enable is referencing into a small amount of data that is organized consistently. It would be useful for grabbing data out of something like a struct, which always same shape in memory. Because there are only 4 bits, could only reference 16 individual values, but in many cases that may be sufficient.
These four bits could also be used to store some extra information. For instance, instead of using two top level op codes for read and write, one of these bits could toggle between read and write. They could also be reserved for selecting devices for I/O and saving even more top level op codes. I wouldn’t get any of the other features, and I do think that this would sacrifice some readability of the hex values, but that eventually won’t matter as much once I start to create languages.
All of these ideas have merits. At some point, I will almost certainly come back and implement multiple options for different circumstances. For now, I am going to implement the small immediate value because it feels like that will be a pain, but I would not be surprised if I rapidly decide that I need other forms.
Instructions
The next available op codes are 0b0110 and 0b0111, which I will use for
reading and writing respectively. Both instructions will need to specify an
immediate, a data register, and an address register. I want to keep the hardware
simple, so I will use pre-existing instructions to inform how I arrange these
three fields so that I can re-use circuitry.
Register operations already use 2 registers and an immediate (specify the type
of register operation there). The target is both read from and written to, so
that can be the data register. The argument register is only read from, so that
can be the address register. The immediate will be the immediate. This give the
following forms: 1010IIIIDDDDAAAA and 1011IIIIDDDDAAAA.
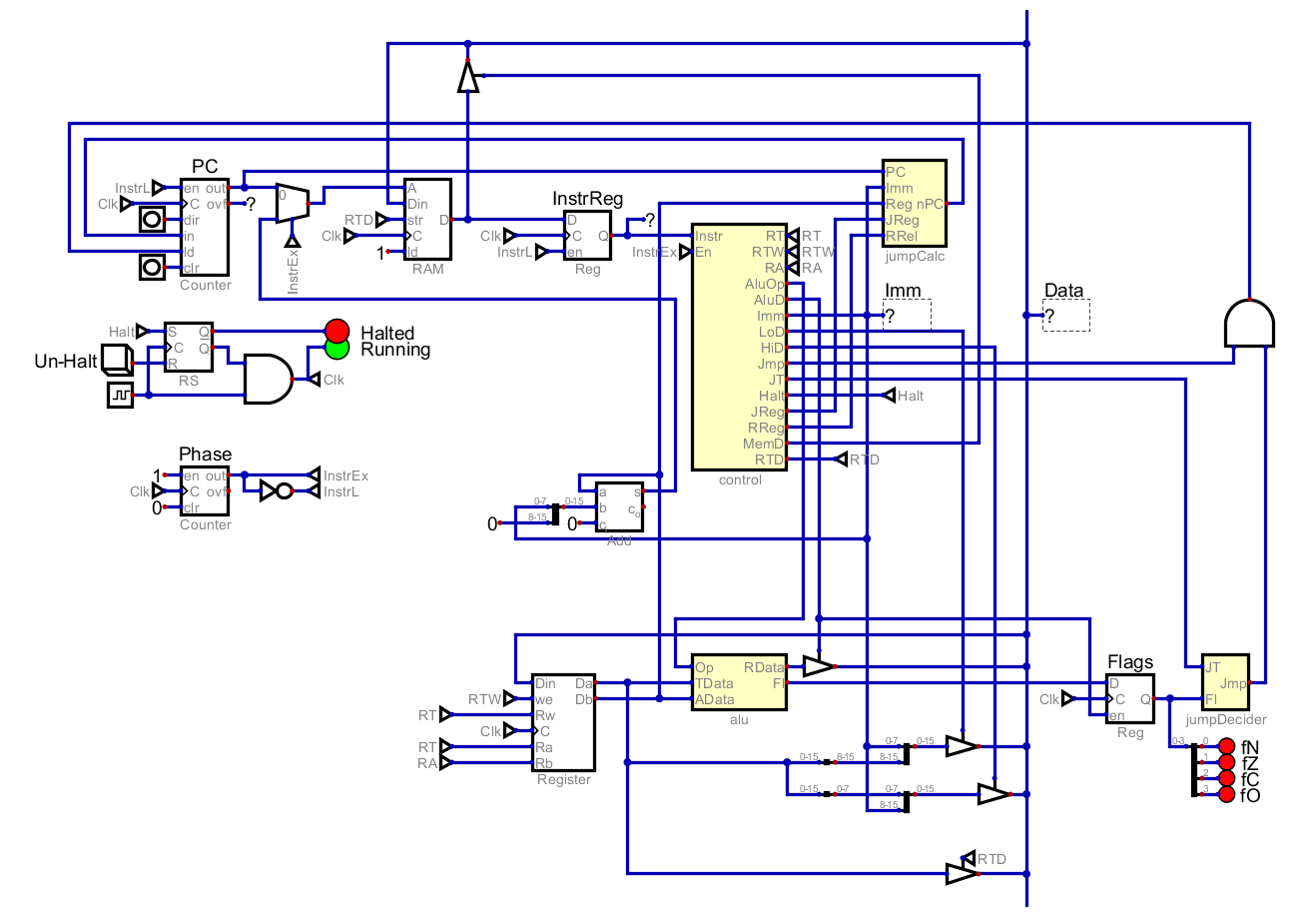
Implementation
In order to read data, I need to be able to load data from RAM onto the data bus, and I need to be able to specify an address other than the PC. Sending data to the bus is straight forward, controlled by a new control line. For the address itself, I need to switch between the PC and the newly calculated address based upon the execution phase.
Because I have already handled getting the address, writing is simply a matter of adding a new control line that enables storing and connecting the data input to the data bus.
This is getting a bit messy, and I would like to take some time to fix it up, but I will cover that in another installation. I will need to create some tests to make sure I don’t break anything. I have started this process and I am keeping some of my programs around. I wrote a simple test for the memory instructions, which reads a value from memory, adds it to itself, and writes it back at that location:
Read data at address register 0 + 4 into register 1
Add the value of register 1 to register 1
Write the data in register 1 to address register 1 + 0
HALT
0x0008 ; this is the data at 0x0004This is translated to the following: 0x6410 0x1011 0x7011 0x0FFF 0x0008.
After execution, the value 0x0010 should appear in address 0x0010.